
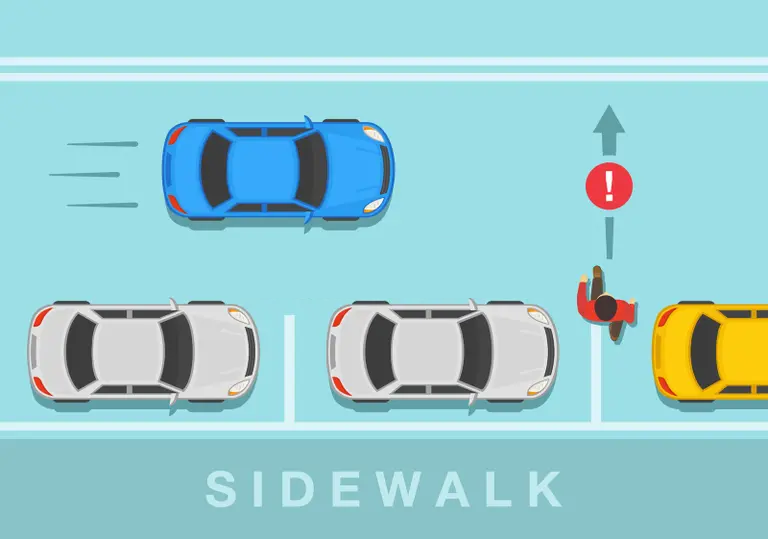
How Do Autonomous Vehicles Handle Sudden “Hidden Pedestrian” Scenarios?
With the rapid development of intelligent automotive technology, autonomous driving has become a key selling point for new energy vehicles. However, one of the trickiest real-world challenges for self-driving systems is handling sudden emergencies like the so-called “hidden pedestrian” scenario — when a pedestrian, cyclist, or other object suddenly emerges from a blind spot into the driving path. How exactly does an autonomous car deal with such edge cases?
👀 From Seeing to Acting: The Chain of Decision-Making
For an autonomous vehicle, whether in routine or extreme situations, the process follows a chain: see → understand → predict → decide → act. This sequence looks simple, but each step requires sophisticated technology and seamless integration.
📷 How Do Autonomous Cars “See” the Road?
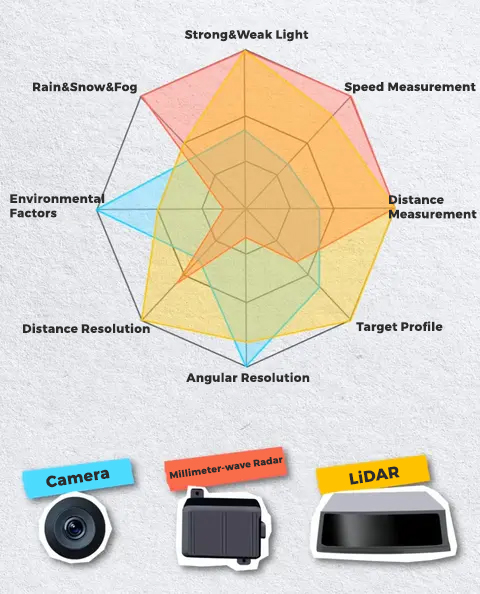
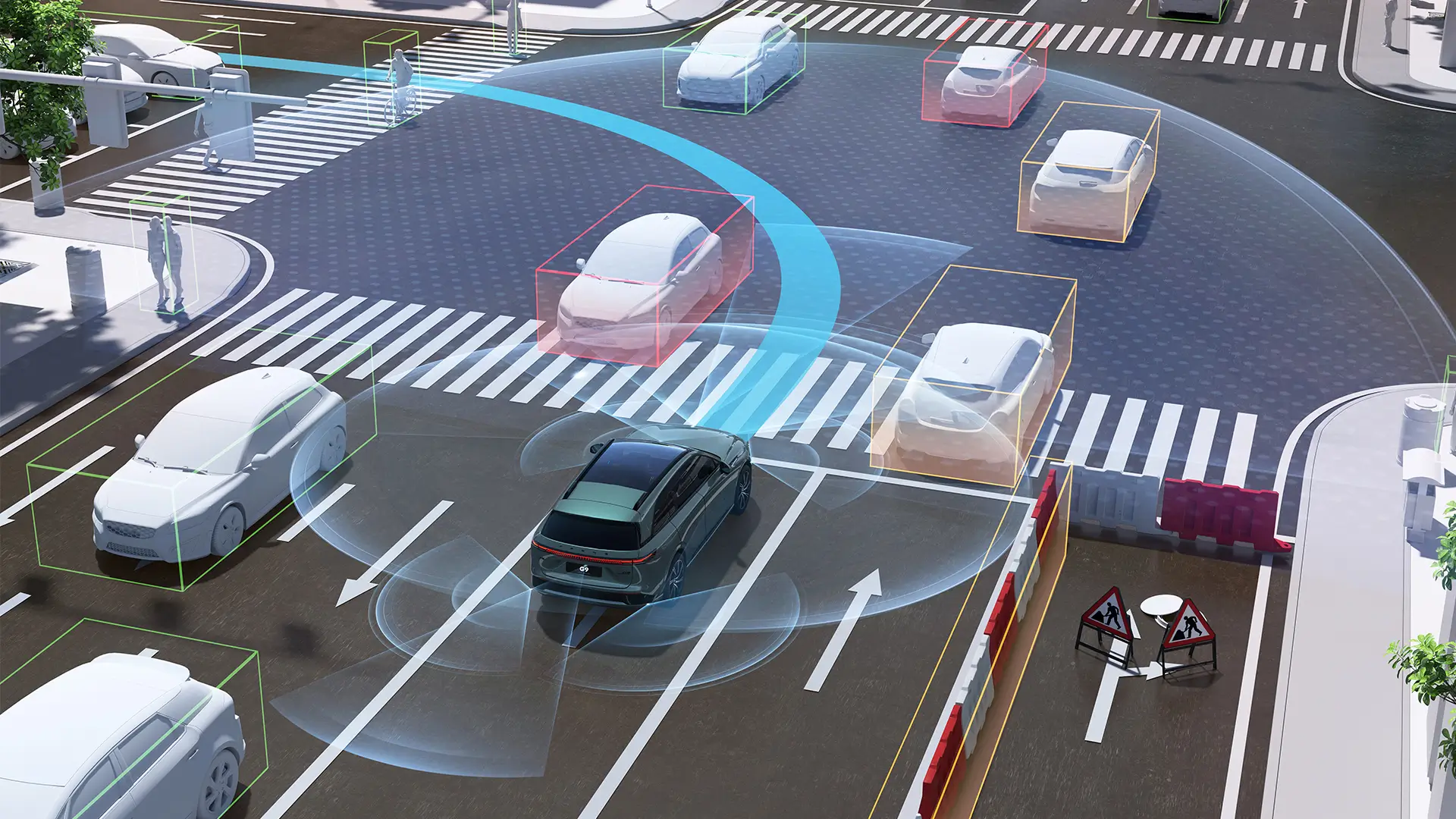
Accurate obstacle avoidance starts with perception. Self-driving cars use a fusion of multiple sensors:
Cameras provide detailed visuals.
Millimeter-wave radar measures speed and works in fog or rain.
LiDAR (laser radar) gives precise 3D distance and shape data.
Ultrasonic sensors handle close-range detection.
Each sensor has weaknesses — cameras suffer under poor lighting, radar introduces noise, LiDAR struggles in heavy rain or reflection. By combining all data streams into a synchronized “joint observation,” the system reduces errors. High-quality vehicles also integrate time synchronization and frequent self-checks to avoid perception delays.
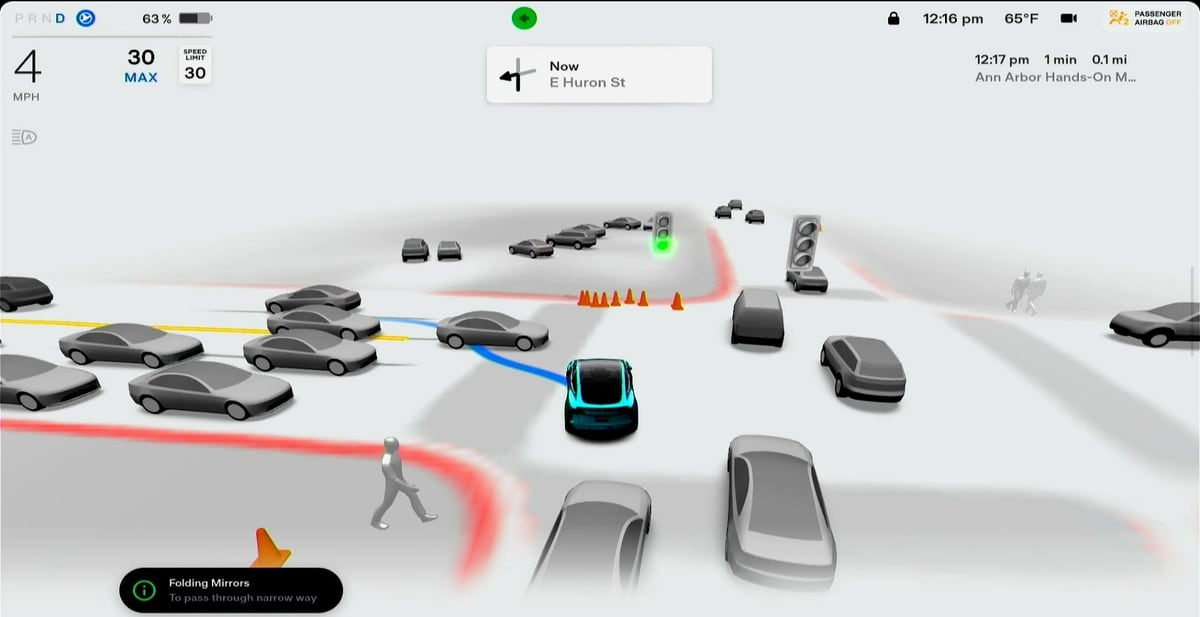
🧠 From Seeing to Understanding
After detecting an object, the car needs to understand it:
Object detection: recognizing whether it’s a pedestrian, cyclist, car, or debris.
Tracking: linking the same object across frames to estimate speed and direction.
Semantic reasoning: judging whether the object might move, is static, or influenced by external forces.
This stage relies heavily on deep learning models for detection and tracking algorithms like Kalman filters. The biggest challenge is uncertainty: for example, a child’s head peeking from behind a bush may generate only sparse signals across sensors. The system must remain cautious even when information is incomplete, without overreacting to noise.
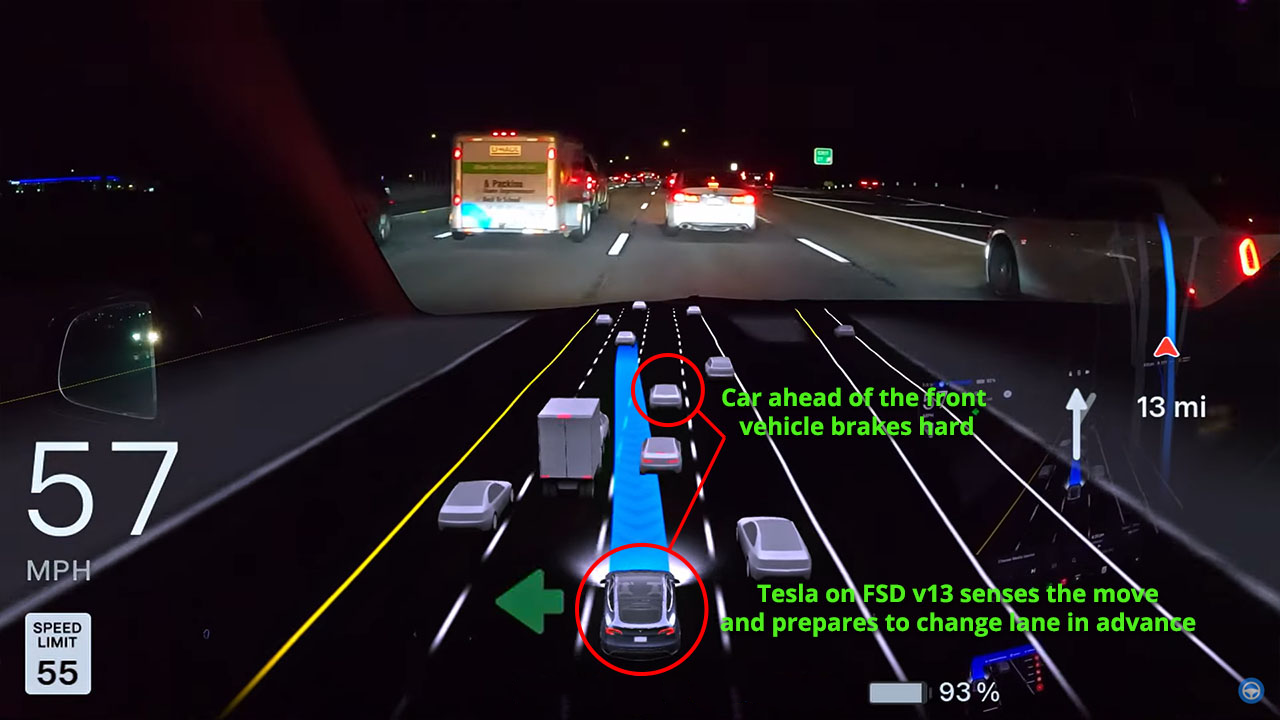
🔮 Predicting the Future
Next comes prediction — not determining exact behavior but producing probability distributions of possible actions: continuing straight, turning back, or running into the lane.
Predictable behaviors (e.g., vehicles in lanes, pedestrians on sidewalks) are easier.
Unpredictable behaviors (like a child chasing a ball) are much harder.
Modern systems generate multiple possible futures and evaluate responses for each. Deep learning sequence models combined with physics-based models improve accuracy, but prediction will never be perfect. Hence, planning must always include fault tolerance for low-probability but high-risk events.
🛣️ Decision and Planning
Once detection and prediction are done, the system decides: brake, steer, slow down, or a combination. Key considerations include:
Safety (avoiding collisions)
Comfort (smooth maneuvers)
Compliance (following traffic rules)
While emergency braking is the most conservative option, it may not always be safest — for example, when there’s a risk of being rear-ended or skidding on icy roads. More advanced strategies like Model Predictive Control (MPC) allow generating feasible trajectories that balance safety, comfort, and legality. A safety layer always overrides risky decisions, ensuring conservative fallback actions.
🎛️ From Plan to Action: Vehicle Control
Once a decision is made, the control system translates it into throttle, brake, and steering commands. This requires precise modeling of vehicle dynamics, tire-road friction, and braking delays.
In sudden “hidden pedestrian” scenarios, the ideal response is smooth but rapid: quickly reducing speed to avoid collision without destabilizing the car or harming passengers. On slippery roads, actions must be earlier and gentler, assisted by systems like ABS and ESC for stability.

⏱️ Time, Redundancy, and Safety Layers
The most critical resource in such cases is time. Minimizing delay in perception–decision–control chains makes responses more effective. That’s why urgent computations are run locally in real time, while heavy data processing happens in the cloud for long-term improvements.
Additional safety considerations include:
Redundant sensors to prevent blind spots.
Diverse algorithms (rule-based + AI models) for backup.
Fail-safe design to bring the car into a safe state if systems fail, like safely pulling over.

🙋 Human Takeover or Full Autonomy?
In L2/L3 systems, handover to the human driver is a common fallback, but this is risky: drivers may not be attentive, and reaction times can be too long. A better approach is for the system to first take emergency action (like braking or steering) and then alert the driver with clear signals.
For higher-level autonomy, the system must independently handle most emergencies, further increasing the demand for strong perception and prediction capabilities.
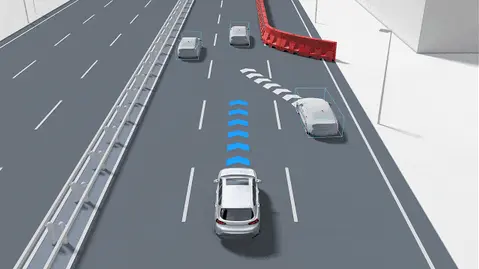
🛑 Evasion vs. Braking: Choosing the Right Strategy
When faced with sudden obstacles, strategies fall into two categories:
Active evasion – steering around the obstacle if safe.
Passive braking – reducing speed as the primary safeguard.
Decision-making modules evaluate the worst-case outcomes across all predicted scenarios and pick actions that avoid unacceptable risks. Some companies adopt formalized safety frameworks like Responsibility-Sensitive Safety (RSS) to define safe distances and speeds. While strict rules ensure verifiability, they can be overly conservative; purely data-driven methods risk failing in rare edge cases.

📊 Learning from Data
Many emergencies arise from rare or unseen scenarios. By collecting data from road tests, near-miss incidents, and driver reports, companies can train and improve models continuously. Consistent labeling, data governance, and scenario replay are vital to improving responses to “hidden pedestrian” events.
✅ Final Thoughts
When it comes to “hidden pedestrian” scenarios, there’s no silver bullet. Emergency braking may feel safest but can cause other risks; relying solely on LiDAR is insufficient in reflective or obstructed conditions. The most reliable solution is a multi-layered safety net, combining diverse sensors, predictive models, conservative decision rules, and fail-safe mechanisms.
A mature autonomous system should always react faster than a human, execute the safest possible maneuver, and manage control and responsibility seamlessly — minimizing risks instead of suddenly pushing them back onto an unprepared driver.
Please explore our blog for the latest news and offers from the EV market.



